 English
English

3D Laser Scanner
Während die
meisten Konstrukteure das Problem haben, eine im Computer entworfene
Form in die Realität zu bringen, ist es bei mir genau anders herum.
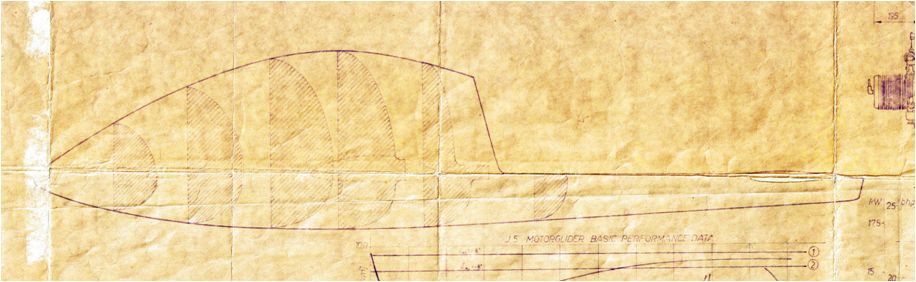
Mir steht ein alter Bausatz mit einer GFK-Rumpfschale sowie Blaupausen aus den 80er Jahren zur Verfügung.
Der Weg zur Digitalisierung dieser Rumpfschale ist nachfolgend aufgezeigt, startend mit der Motivation, warum man als Flugzeugkonstrukteur einen Flugzeug-3D-Laser-Scanner baut:
Der in der alten Konstruktion verwendete Motor ist nicht mehr verfügbar und entspricht auch nicht mehr dem Stand der Technik.
Ein
anderer Motor für die J-5 bedingt nicht nur die Neukonstruktion des
Motoreinbaus sondern auch die Krafteinleitungen in den Rumpf und zu den
Flügelaufnahmen hin.
Zu Beginn dachte ich, dass sich diese Aufgabe
old-School mittels MockUps lösen lässt. Doch als ich den schweren Klotz
dann eine Weile an den Rumpf hielt fiel mir auf dass man das nicht
lange hält und dabei noch entspannt nachdenkt. Es war klar dass im 21.
Jahrhundert 3D-CAD der richtige Weg ist.
Für die J-5 hatte ich bereits einen Motor-Test-Stand
in 3D entworfen und war begeistert wie gut das Ergebnis der
modellierten Idee entsprach. Erinnerungen an Flugzeuganhängerbauten mit
Handskizzen sahen da ganz anders aus – wie oft musste man da Sachen
wieder rückwärts bauen weil man an einige Dinge auf dem 2-dimensionalem
Papier einfach nicht denkt. Ganz besonders reizvoll aber ist, dann man
3D-konstruierte Bauteile einer Simulation unterziehen kann. Diese
Simulation ersetzen zwar den Belastungstest nicht, zeigen aber mit
bestechender Präzision Schwachstellen in einer Konstruktion auf.
Das ganze bedeutet zwar einen gewissen Mehraufwand, der sich aber für den konstruierenden Amateur lohnt.
Insbesondere
die Simulation der Bauteile und Baugruppen vermittelt ein tiefgründiges
Verständnis für deren Belastung und Dimensionierung.
Sind die
3D-Daten einmal da, so haben es zukünftige Erbauer leichter sich neue
Formen zu fräsen und so sonst nicht-nachbaugeeignete Konstruktionen
wiederzubeleben.
Ein stückweit stellt dies den Erhalt von Luftfahrtgeschichte für die Nachwelt dar.
Nicht zuletzt ist ein 3D-konstruiertes Teil eine hervorragende Form der Dokumentation.
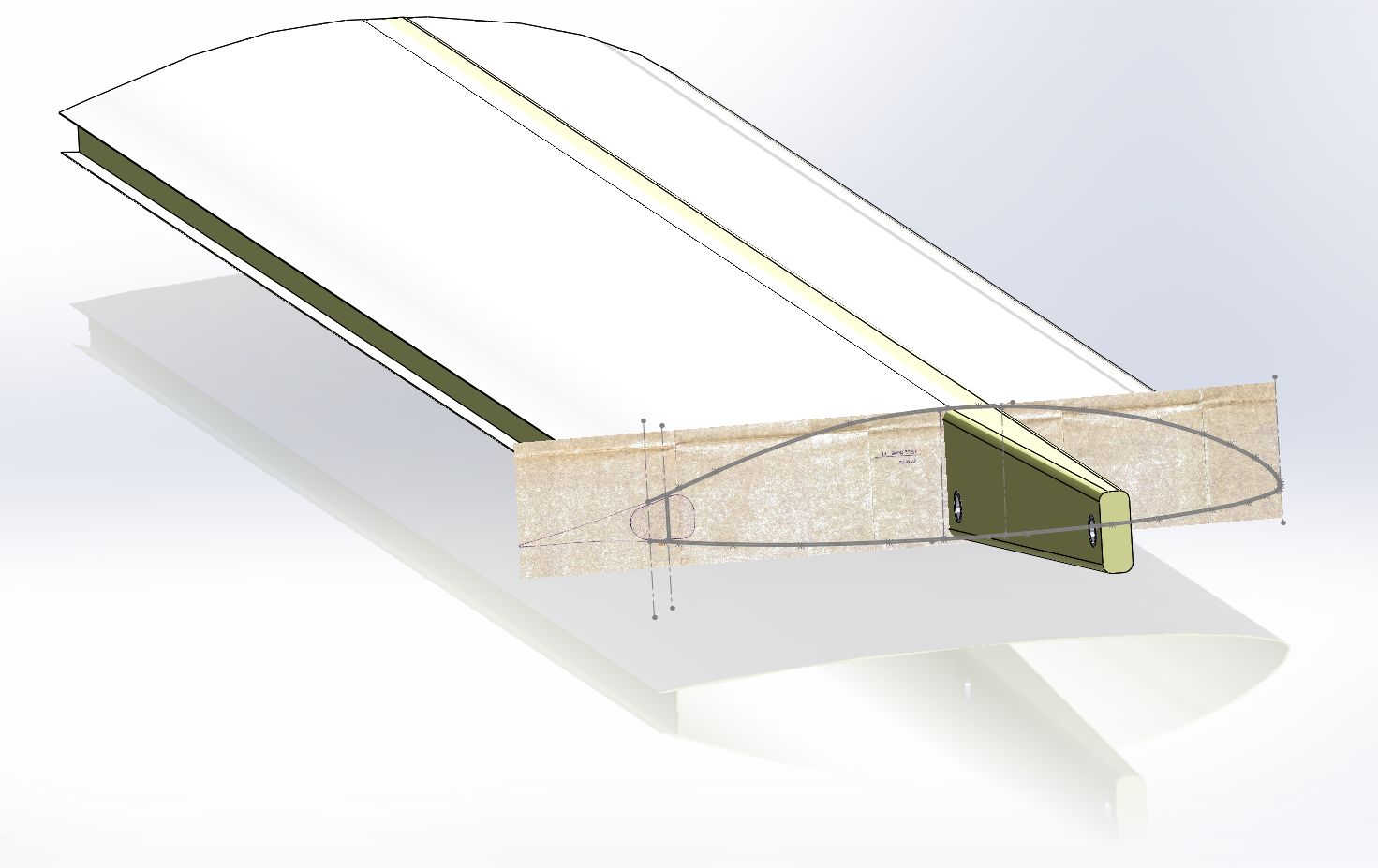 Plan Ungenauigkeiten (Holm passt nicht in Flügel)
Plan Ungenauigkeiten (Holm passt nicht in Flügel)
Angefangen habe ich natürlich damit die vorhandenen Pläne zu digitalisieren. Naiv erwartete ich dass die Pläne maßhaltig zu den vorhandenen Teilen wären. Enttäuscht musste ich jedoch feststellen, dass dies für die Blaupausen der 80er Jahre nicht zutrifft. In diesem Beispiel kommen die Daten des Holms von einer Messungen, und die des Flügelsandwich aus dem Originalplan. Wie man sieht steht der Holm viele Millimeter aus dem Flügel heraus. Die Planungenauigkeit liegt im Bereich von ca. 1 cm.
Schaut man in die Pläne für den Rumpf, so wird
schnell klar dass man aus ihnen kein 3D-Modell ausreichender
Detailtiefe und Genauigkeit generieren kann.
3D-Modell mit Planquerschnitten 
Als Versuch habe ich die Planquerschnitte ins 3D-Tool eingegeben, dabei wurde aber schnell klar dass wenn die vorhandenen Teile verwendet werden sollen diese exakt vermessen werden müssen.
Für die Modellierung des Rumpfes werden genaue Querschnitte benötigt.
Um
diese zu erstellen muss die Entfernung in Y-Richtung relativ zu einer
Referenz gemessen werden. Macht man das für alle Z-Werte ergibt sich
der Querschnitt.
Diese Querschnitte müssen für mehrere X-Stationen erfasst werden um ein vollständiges Modell des Rumpfes zu gewinnen.
Die manuelle Vermessung der Flügelwurzel hat gezeigt wie mühsam und fehlerträchtig ein rein manuelles messen ist. Insbesondere
haben sich mechanische Referenzen als schwierig erwiesen. Im Gegensatz
zur relativ einfachen Flügelwurzel wäre die sphärische Oberfläche des
GFK-Rumpfes nur schwer rein manuell erfassbar. Um überhaupt zu
brauchbaren Ergebnissen zu kommen hätte man sich komplexe
Messvorrichtungen bauen müssen. Daher machte eine rein manuelle
Vermessung keinen Sinn und schied aus.
Was es jedoch alternativ gibt sind Laser-Entfernungsmesser:
Diese
senden einen Laserstrahl aus, welcher vom zu vermessenden Objekt
reflektiert wird. Aus der Zeitdifferenz wird die Entfernung errechnet.
Schau man sich in einschlägigen Online-Shops um, so stell man fest dass diese mittlerweile recht günstig zu kaufen sind.
Also ergab sich für mich damit folgende Idee:
Ich
nehme einen Laserentfernungsmesser und lasse ihn an einer Stange
hoch und runter fahren. Das hoch-und-runter-fahren wird mittels
einer M6 Gewindestange erledigt. Eine Mutter welche sich auf einer
solchen Stange dreht legt 1mm/Umdrehung zurück. Die Muttern werden
in eine Halterung gesteckt welche von einem Getriebemotor gedreht
werden.
Als Getriebemotor bin ich bei Pollin für 15€ günstig fündig geworden. Dieser Motor macht alle 2 Sekunden 1 Umdrehung. Das ist langsam genug um Umdrehungen zählen zu können
Zum zählen der Umdrehungen habe ich dann eine einfach Lichtschranke gefunden wie man sie komplett fertig als kleines Bauteil für einen Spottpreis kaufen kann. Eine Halbscheibe unterbricht alle halbe Umdrehung den Lichtstrahl. Diese Lichtschranke wird dann zusammen mit der Codierscheibe an dem Spindeltrieb angeordnet.
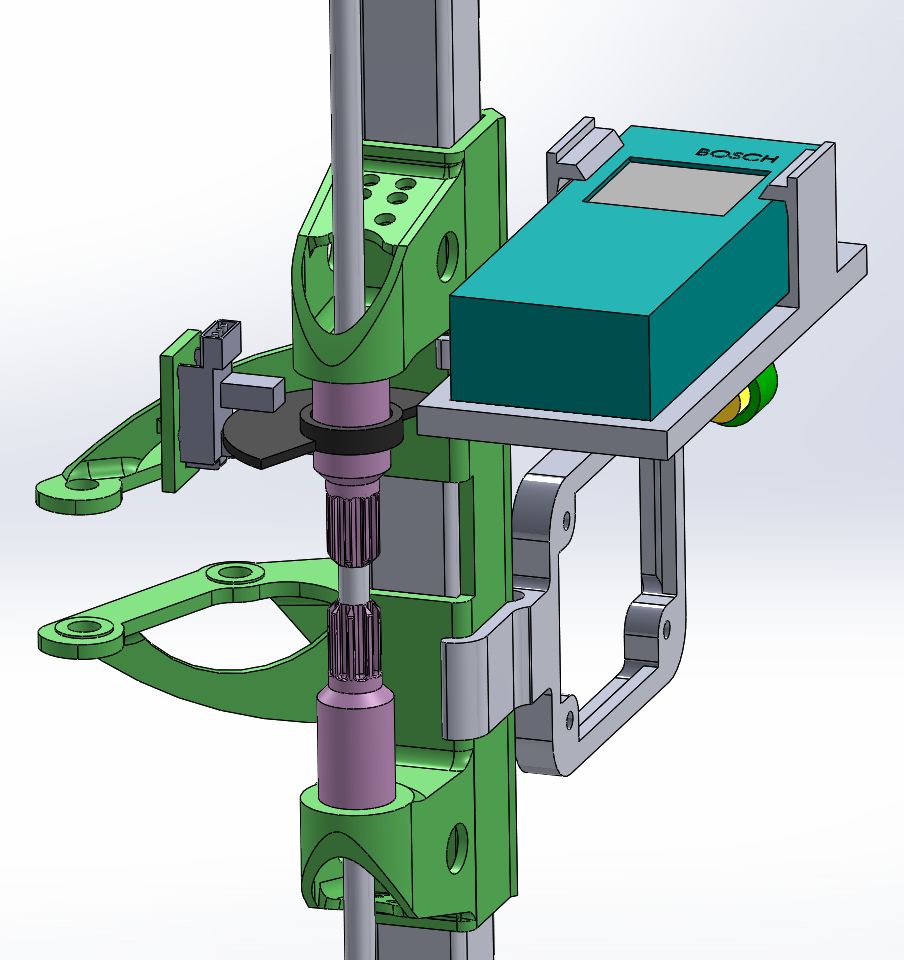
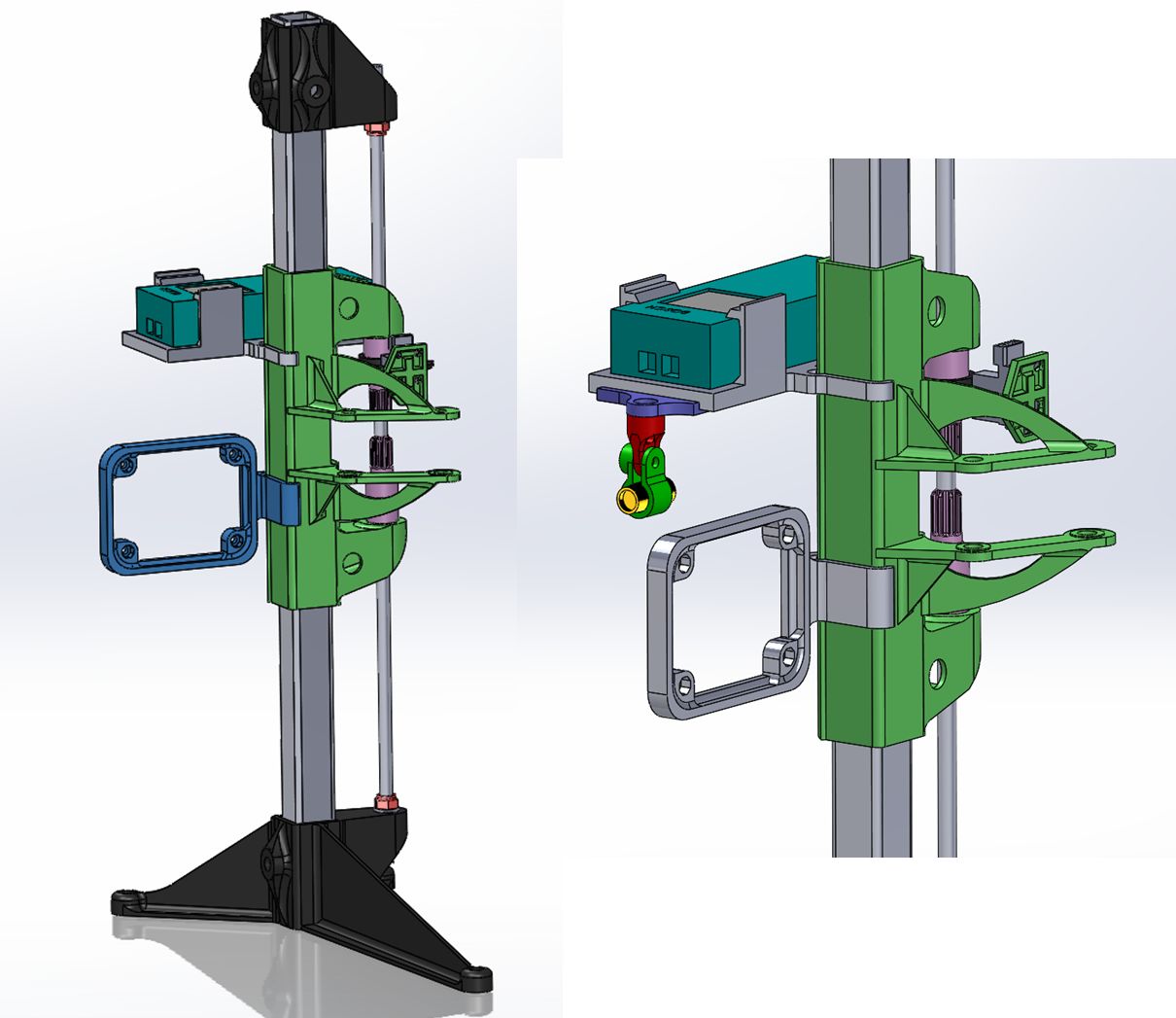
Dann brauchen wir noch einen Träger der später die Elektronik halten wird sowie einen verstellbaren Halter für einen Linienlaser. Später werden wir sehen dass so ein Linienlaser den man für wenig Geld bei Ebay kaufen kann einem das Leben beim ausrichten sehr erleichtert.
Das Ergebnis ist ein ProfilScanner. Weiter
unten werde ich darauf eingehen wie man mit wenigen Klicks und
dazu sehr günstig von der Idee zum funktionierenden Objekt kommt. Hier
dargestellt ist die 3D-Modellierung der ScannerIdee sowie deren
Verwirklichung.
Mechanisch sind wir also fertig, jetzt müssen wir das alles noch elektrisch zusammen bringen.
Was
wir haben ist also der Laserentfernungsmesser mit einer
USB-Schnittstelle sowie ein Computer der die Messungen auffangen soll.
Wir müssen den Motor rechts- oder linksrum drehen lassen und die
Lichtschranke auslesen können.
Also stecken wir erst mal einen normalen USB-Hub in den Computer. In diesen stecken wir den Laser-Entfernungsmesser und damit haben wir diesen schon mal angeschlossen. Weiterhin gibt es sehr günstig kleine USB-Module (z.B. DLP-2232H), welche es selbst dem Hobby-Programmierer leicht machen elektrische Signale auszugeben und einzulesen. An dieses Modul schließen wir jetzt den Motor über einen Brückentreiber (TLE5206) sowie die Lichtschranke direkt an. Auch der erwähnte Linienlaser wird direkt angelötet.
Dieses elektrische System ist recht einfach aufgebaut.
Der Aufbau des ganzen erfolgte händisch auf
einem kleinen Stück Lochrasterplatine. Oben zu sehen ist das besagte
USB-Modul sowie der Brückentreiber für den Motor.
Mit zwei manuellen Tastern kann man die Elektronik überschreiben und ein verfahren des Motors erzwingen.
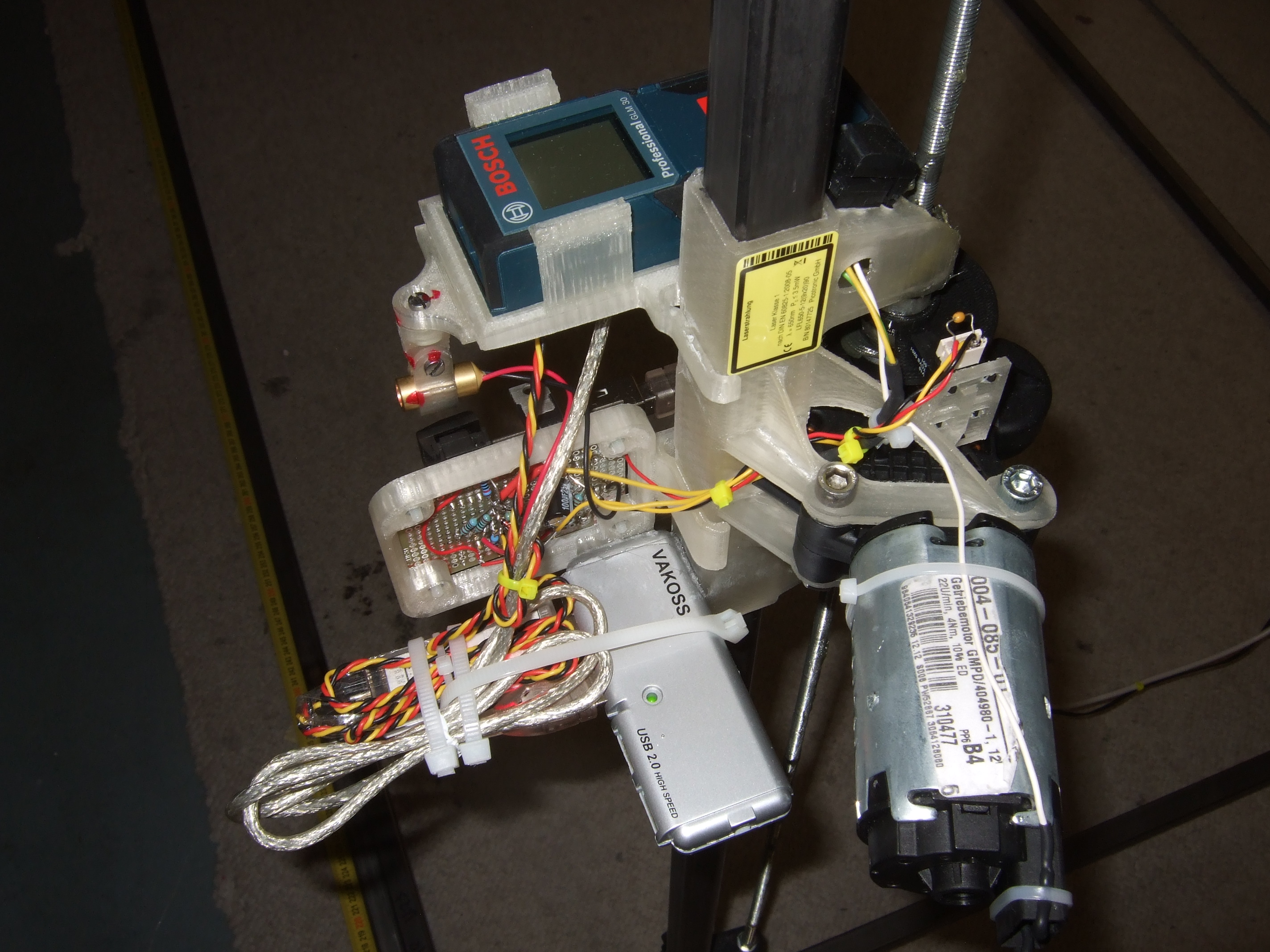
Auf diesem Bild sieht man sehr schön den kleinen
USB-Hub. Da diese heutzutage sehr wenig kosten habe ich ihn einfach mit
Sekundenkleber angeklebt.
Was man auf diesem Bild noch sieht sind
zwei Endanschlagschalter. Sollte aus welchem Grund auch immer der Motor
in den Anschlag fahren so wird der Strom des Motors direkt unterbrochen.
Wie auf diesem Bild zu sehen beschränkt sich die zu verlötende Elektronik auf wenige Widerstände und Kondensatoren.
Entstanden ist diese Elektronik wie hier zu sehen in unserem "High Tech" -Elektroniklabor.
Während Mama unseren Größten in den Kindergarten gebracht hat, hat Papa die Chance erfasst an der Bastelstunde teilzunehmen.
Im Video sieht man das ganze in Aktion:
Der
Getriebemotor dreht den Spindelantrieb und verfährt den
Scanner. Alle 2 Umdrehungen stoppt der Motor und der Laser macht
eine Messung.
Der
Prozess sieht langsam aus. Das ist er auch und soll auch so sein: Die
einfache Elektronik zusammen mit einem sehr einfachen Ansteuerprogramm
verbietet ein schnelles Verfahren des Scanners.
Was jetzt noch felt ist eine Ansteuersoftware.
Diese habe ich in C geschrieben und mit National Instruments CVI
kompiliert. Die grafische Nutzeroberfläche ist oben zu sehen.
Um den
Motor manuell zu verfahren gibt man bei "manual control" den Wert ein
um wie viel mm hoch bzw. runter gefahren werden soll. So fährt man
den Scanner unter anderem in die Null-Position
Um zu scannen sagt
man dem Programm um wie viel man hoch bzw. runter scannen
will und alle wie viel mm man einen Messpunkt möchte. Dann
klickt man auf "Scan" und los gehst.
Während die Z- sowie
Y-Koordiaten vom Programm automatisch ermittelt werden, muss die
X-Koordinate, also die Station von Hand eingetragen werden. Und
wenn ich sage von Hand, dann meine ich dass man von einem einfachen
Stahlmessband den mm-Wert abließt. Somit ist der 3D-Scanner
halbautomatisch ein Kompromiss aus Komplexität und Komfort.
Die
Daten werden dann vom Programm in Text-Form ausgegeben. Für jede
Station wird eine neue Datei erzeugt, welche später vom 3D-CAD-Programm
als sogenannter XYZ-Splin importiert wird.
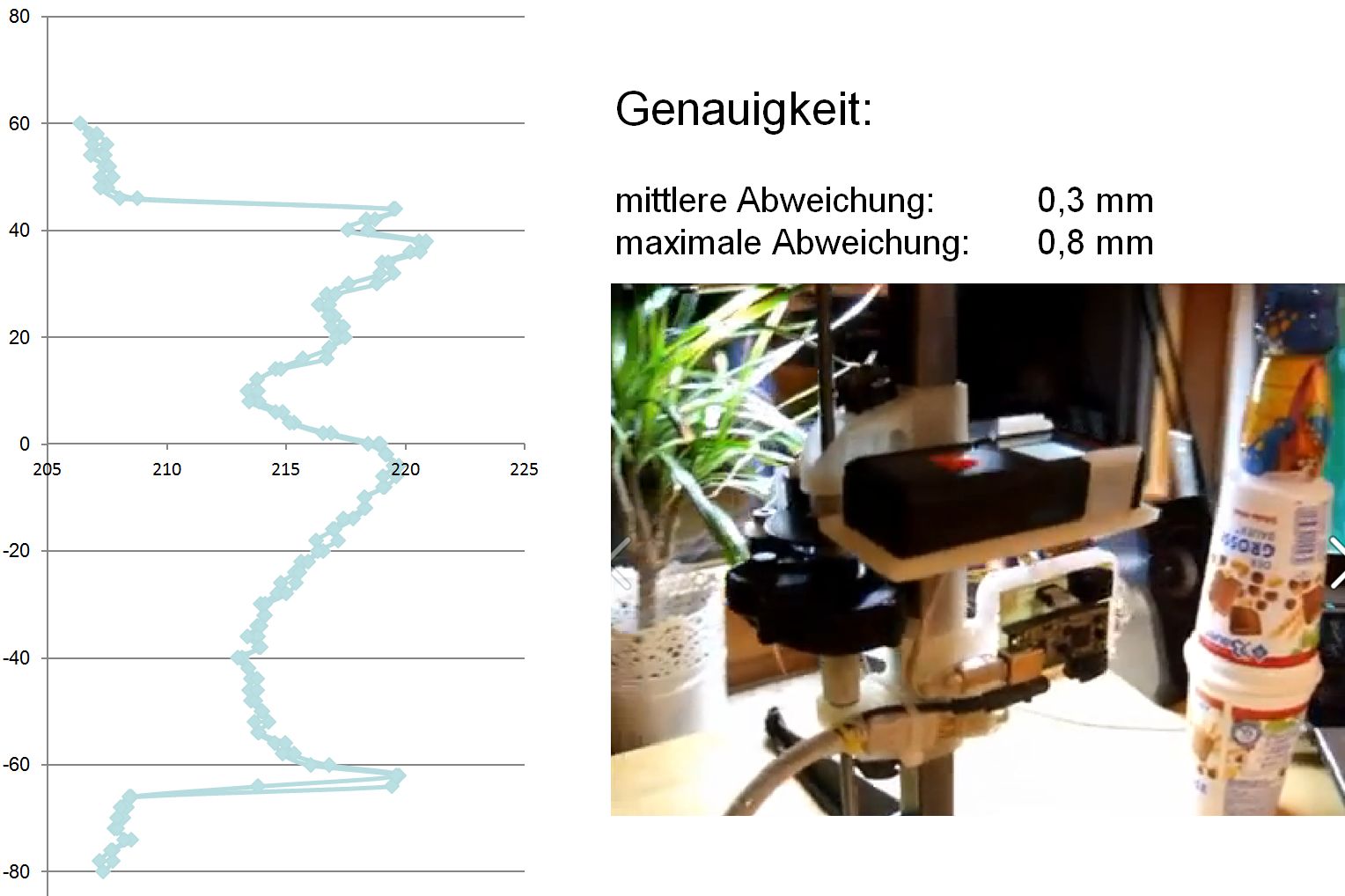
Eine große Frage ist natürlich: Wie genau ist
das ganze? Beworben werden die Laser-Entfernungsmesser mit einer
Genauigkeit von +/-2mm. In Wirklichkeit sind sie aber viel besser!
In diesem Beispiel habe ich den Jogurtbecher meines Sohns
vermessen. Der Form wegen taugt der zwar nicht als Harzbecher, als
Scan-Objekt aber allemal. Ich habe die Punkte in Excel eingelesen und
die maximale sowie mittlere Abweichung berechnen lassen. Das
Ergebnis ist überraschend gut:
0,3 mm mittlere,
0,8 mm maximal
Abweichung!
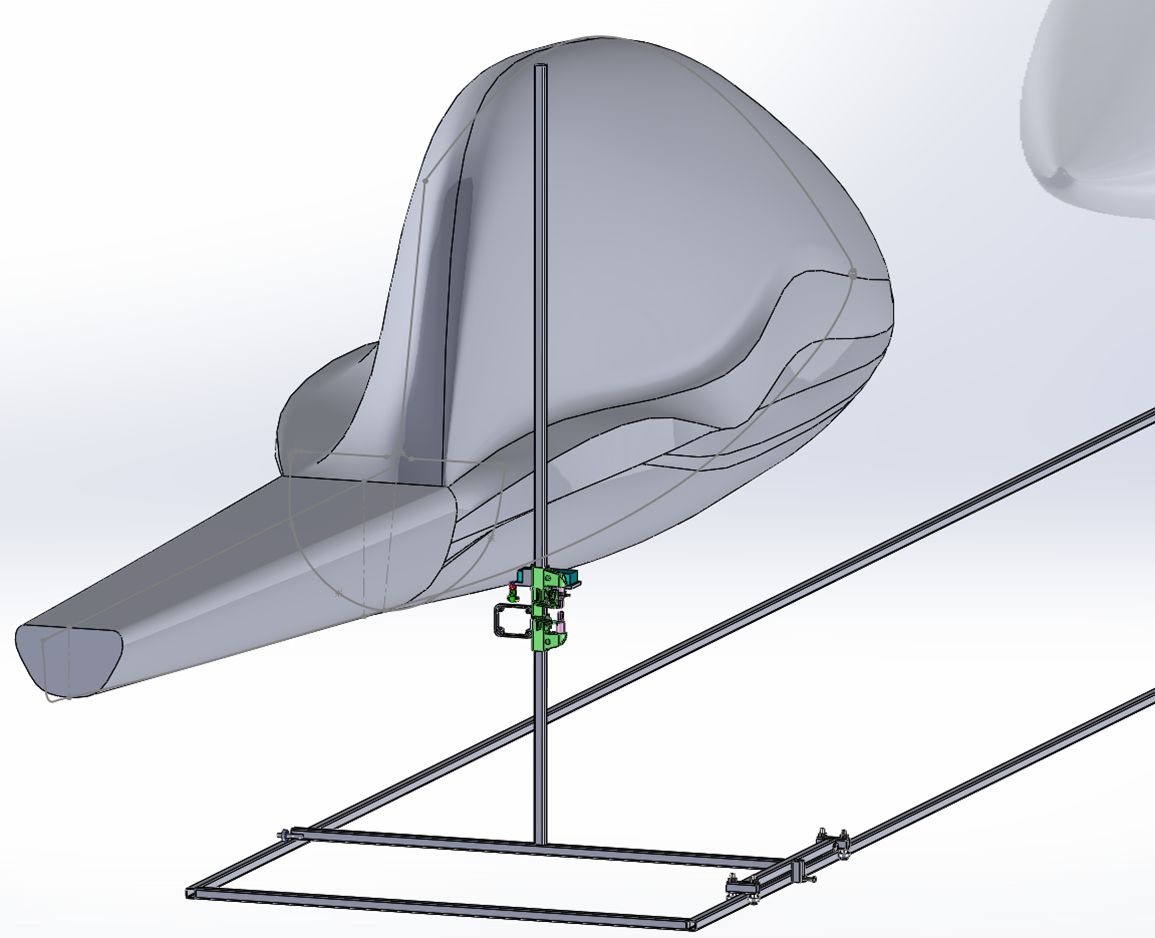
Jetzt haben wir den Scann-Kopf betriebsbereit und
müssen nur noch eine in X-Richtung verfahrbare Einrichtung schaffen.
Die 3D-modellierte Idee besteht komplett aus 20x20x2 Stahlprofilen.
Diese sind sehr günstig im Stahlhandel zu erhalten. Auf den Boden habe
ich zwei jeweils 6m lange Stangen als Schienen gelegt. Anders als in
diesem Bild habe ich auf die Querstreben verzichtet, da die Stangen
selber bereits gut genug auf dem Boden lagen.
Den verschiebbaren Wagen habe ich dann aus 3 Rohren zusammengeschweißt. Zu
bemerken ist, dass man die senkrechte Stange wohl kaum perfekt
senkrecht hinkriegt, allein schon wegen dem thermischen Stress beim
Schweißen. Im weiteren werden wir aber sehen, dass dies aber gar kein
Problem ist, da sich durch Referenzmarken am Objekt diese Fehler wieder
rausrechnen lassen.
Vor der praktischen Herstellung wurde alles 3D-Modelliert.
Als Detail möchte ich die Laufrollen erwähnen, von denen ich überrascht bin, dass man in Zeiten von Inlineskates (so was wie Rollschuhe) 16 Stück für sehr wenig Geld zu kaufen kriegt. Zu Anfangs wollte ich den Schlitten einfach auf den Schienen rumrutschen lassen, aber kugelgelagert ist es viel einfacher.
 Arretierung
Arretierung
Eine Feststellschraube fixiert den Schlitten während der Messung.
Hier im Video ist zu sehen wir schön leicht sich der Schlitten auf seinen Rollen verschieben lässt: > Video - Klick < !
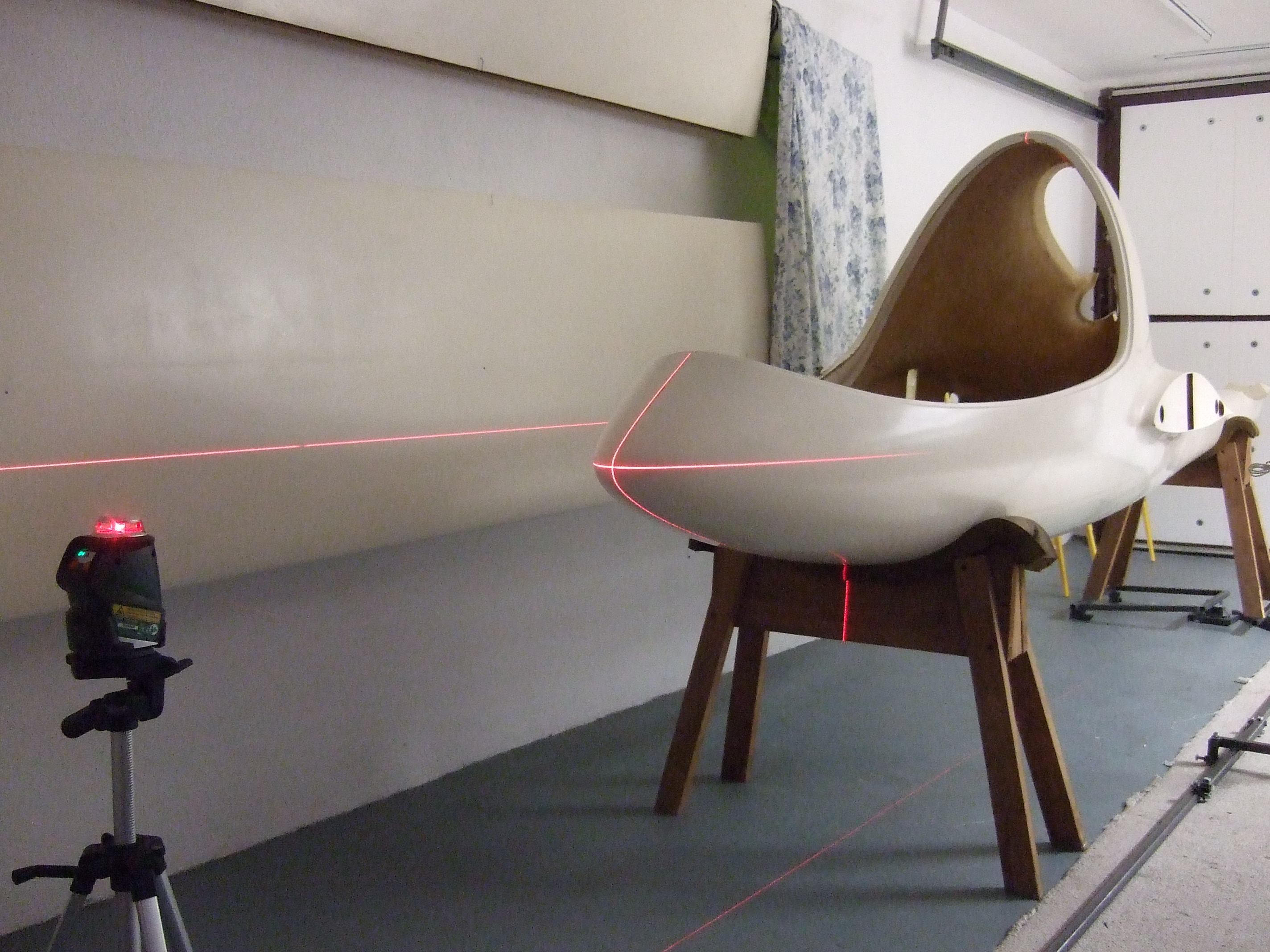
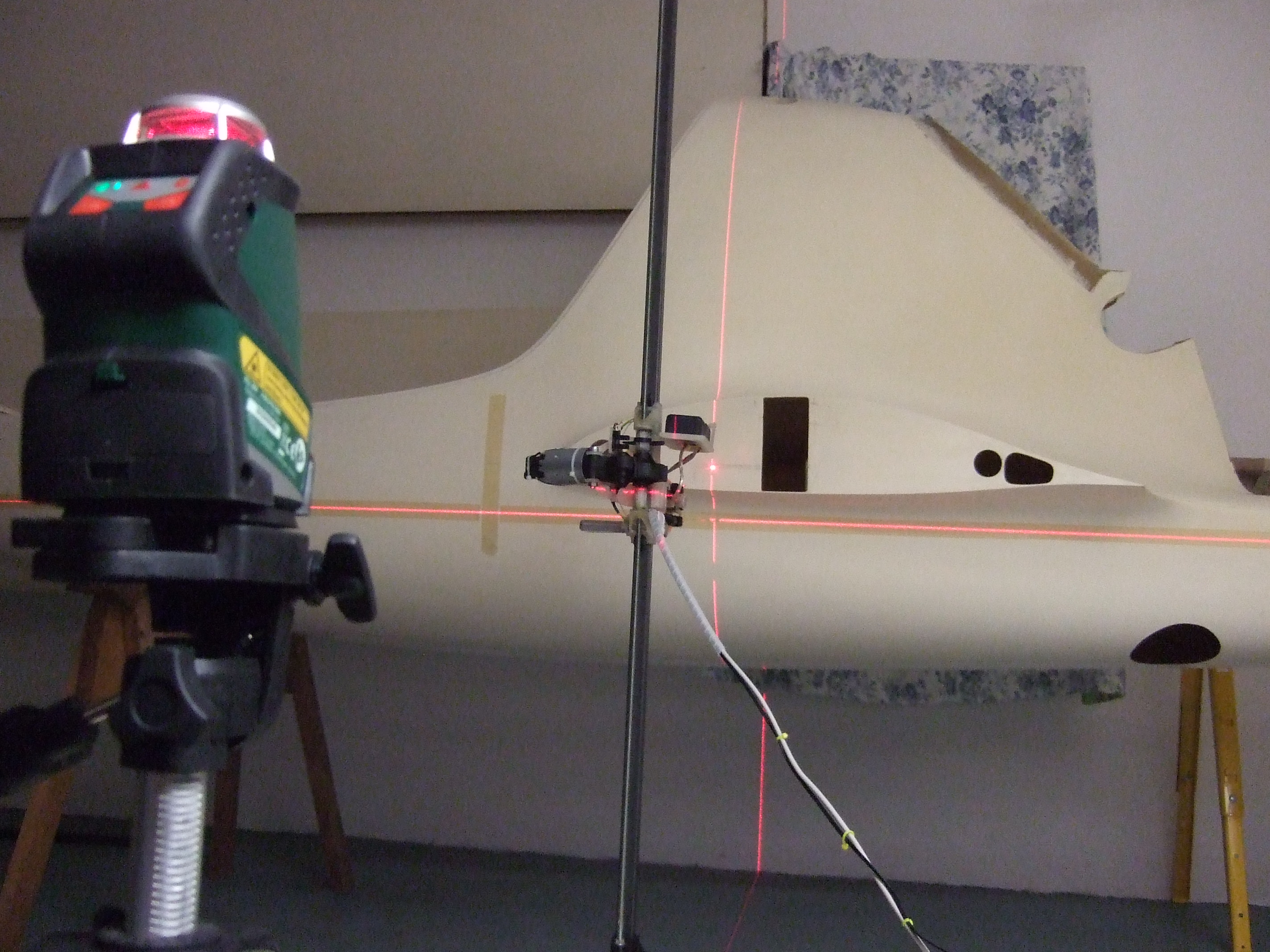
Der Bau des Scanners ging erstaunlich flott von der Hand. Was dann aber erstaunlich lange dauerte war das Ausrichten des Messobjektes. Unentbehrlich hierfür ist ein Kreuz-Linienlaser
Im Bild oben sieht man schön den Einstellwinkel des Tragflügels. Während der Rumpf horizontal ausgerichtet ist, hat das Flügelprofil einen Einstellwinkel.
Das mm-genaue Ausrichten einen viele Meter großen
Objektes erscheint als eine aussichtslose Aufgabe. Ich habe einen ganzen
Abend so lange an dem Rumpf rumgerückt bis ich letztlich verzweifelt
ins Bett gegangen bin.
Am nächsten morgen wurde mir dann klar dass das exakte Ausrichten für die Scans selber gar nicht nötig ist. Wichtig war dass man bei ausgerichtetem Rumpf eine absolut korrekte Referenzlinie anzeichnet an der man dem Laser die 0-Stellung gibt.
Diese lässt sich recht leicht mit dem Kreuzlinienlaser, Tesa-Kreppband und einem Bleistift anbringen. Anschließend richtet man diese Bezugslinie genau so aus wie der Scann-Schlitten schief ist und schon hat man diesen Fehler korrigiert. Vor jedem Scannen wird die Laser-Null mit der Bleistift-Null abgeglichen.
Jetzt gibt es noch zwei weitere Fehler die auftreten können:
1.) Besagter senkrechter Scanner Schlitten ist schief
2.) Der Rumpf steht schief im Bock.
Beides
kann jedoch korrigiert werden wenn man am Rumpf selber eine
Mittelmarkierung anbringt. Diese wird vom Scanner erfasst und man kann
die Messkurve später rechnerisch gerade drehen.
Als Markierung habe ich die billigste 20m-Rolle 5mm dickes Fensterdichtband verwendet von Ebay verwendet.
Einen
Abend vor dem Scann-Beginn habe ich noch spendiert um einen
Hauben-Dummy zu laminieren. Mir war nicht ganz klar wie sich der
Laserstrahl mit dem Glas arrangieren würde. Während die ganze Sache
härtete überlegt ich, ob ich den Glasrohling nicht einfach hätte mit
Wasserfarbe streichen sollen. Aber im Amateurbau ist wohl alles ein
Lernprozess...
Ausgerichtet und mit Hauben-Dummy ging die Scannerei dann endlich los.
Als X-0-Referenz habe ich die Flügelnase gewählt. Hier im Bild sieht man die ersten Scans Richtung Cockpit.
Jetzt wurde Querschnitt für Querschnitt gescannt und die Rohdaten letztlich ins 3D-CAD-Programm eingelesen.
Hier im Bild sieht man die vorläufigen Rohdaten. Auch wenn diese noch nachbearbeitet werden müssen sieht man die grundsätzliche Rumpfform sowie die Referenzmarkierungen.
Diese Daten müssen jetzt noch nachbearbeitet werden. Es muss der Anfangs-/End-Punkt festgelegt, der Z-Offset beseitigt sowie die Querschnitte um die Längsachse gerade gedreht werden.
Anschließend werden die Scans verwendet um das 3D-Modell des Rumpfes zu erstellen.
Soviel zum Scannen selber, jetzt aber noch einiges zur Herstellung der Teile:

Bei der Konstruktion des 3D-Scaners habe ich
ganz massiv auf 3D-Drucktechnologie zurückgegriffen. Vorteil ist, dass
man beliebig komplexe Formen im 3D-Tool für seine Konstruktion
generieren und diese anschließend einfach ausdrucken kann. Hier
dargestellt ist der Weg von der 3D-modellierten Idee, über die
ausgedruckten Teile hin zum einsatzbereiten Zusammenbau.
Um ein Gefühl für die Druckzeiten zu geben habe ich ein paar Teile zum Anfassen mitgebracht.
- Lasergelenk 12 min
- Spindelmutteraufnahme 15 min
- Halteadapter 25 min
- Entfernungsmesserhalter 40 min
- Elektronikhalter 45 min
- Grundträger 6 h

Diesen 3D-Laser-Scanner habe ich 2015 auf der OUV-Wintertagung vorgestellt, wo er auf großes Interesse stieß. Daher für Nachahmer hier einige Sachen zum runterladen. Alles natürlich ohne jegliche Gewähr! Wer mit sowas experimentiert muss Fachmann genug sein um zu wissen was er tut! Ich übernehme ausdrücklich keinerlei Verantwortung irgendeiner Art!
C-Kerndateien Dateien für Ansteuerprogramm (11 kByte)
Video Scanner im Betrieb (2,7 MByte)
Alle
Daten können zum privaten Gebrauch unter Angabe der Quelle für
Hobby-Zwecke (insbesondere Amateur-Flugzeubau) verwendet werden. Eine
gewerbliche Verwendung meines geistigen Eigentums bedarf meiner
Zustimmung.
Impressum, Disclaimer & Datenschutz
 3D Laser Scanner-Idee
3D Laser Scanner-Idee
 3D to Real
3D to Real
 Detailreicher Mittelrumpf
Detailreicher Mittelrumpf 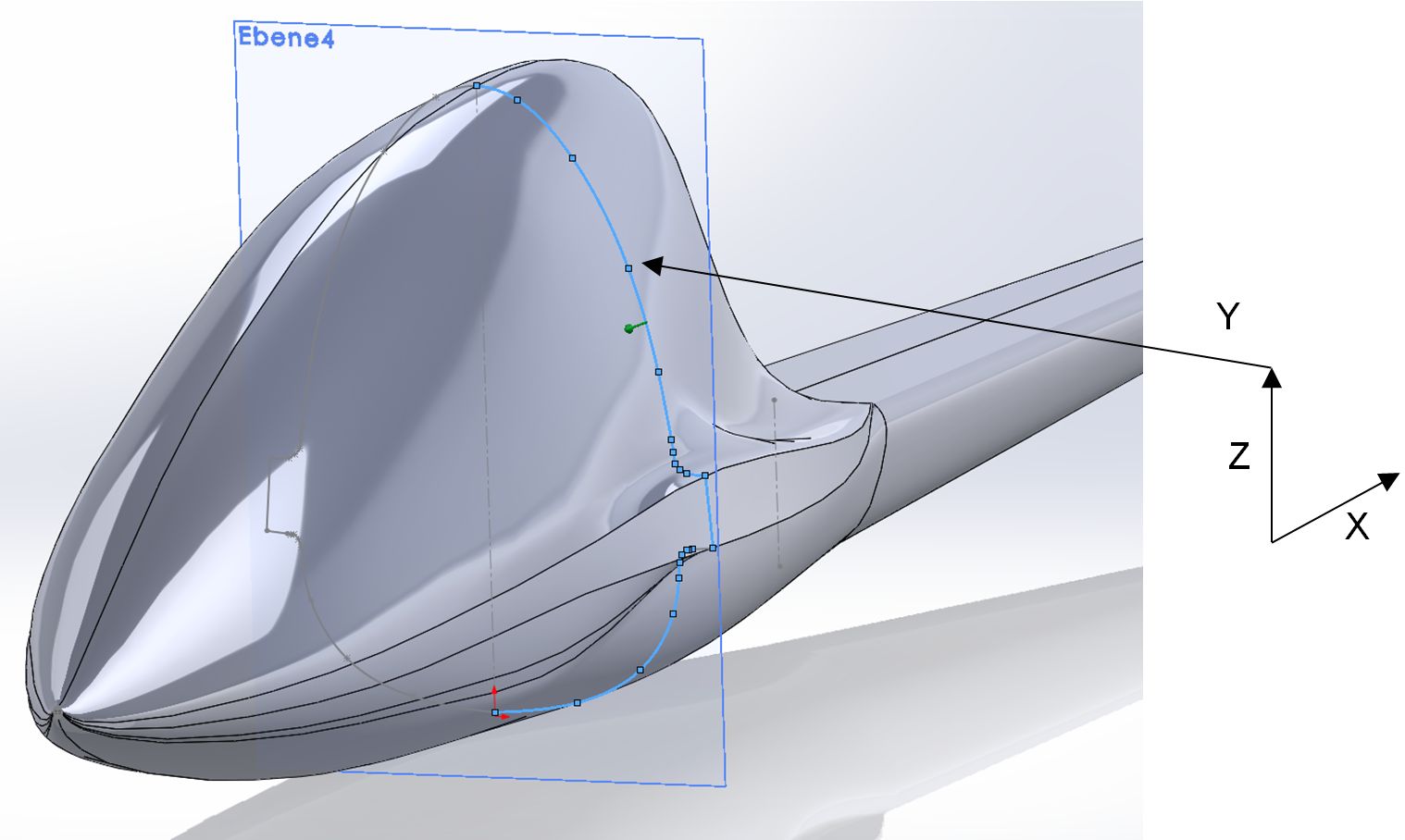 Messaufgabe
Messaufgabe
 Laser Entfernungsmesser
Laser Entfernungsmesser 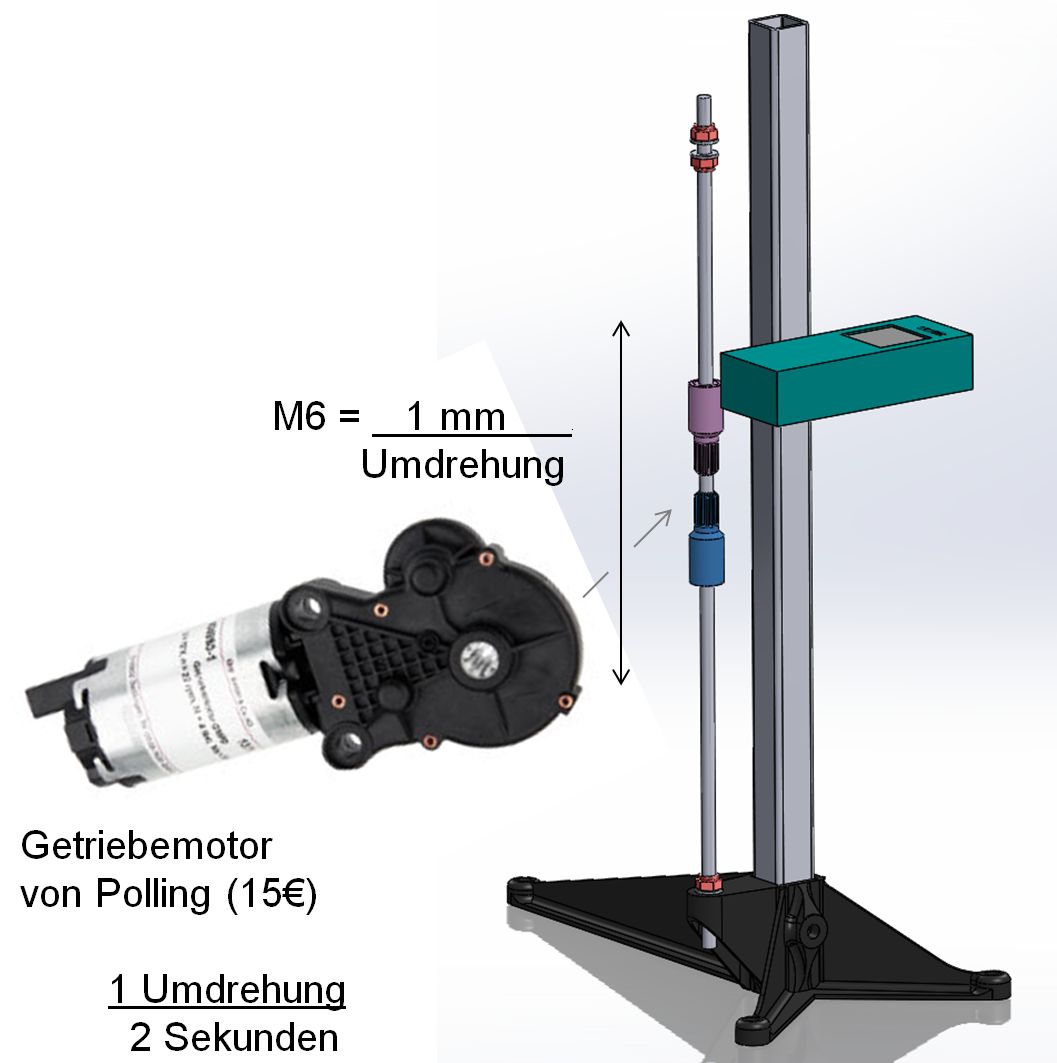
 Lichtschranke
Lichtschranke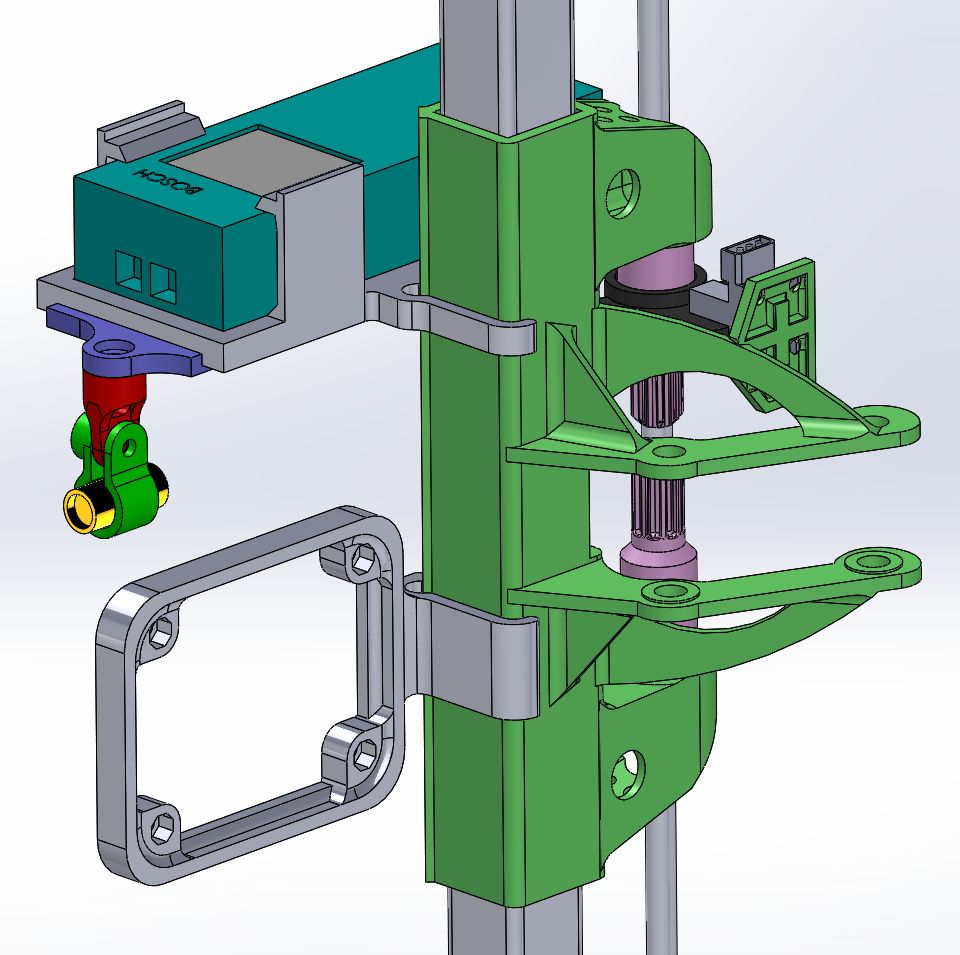
 Messkopf
Messkopf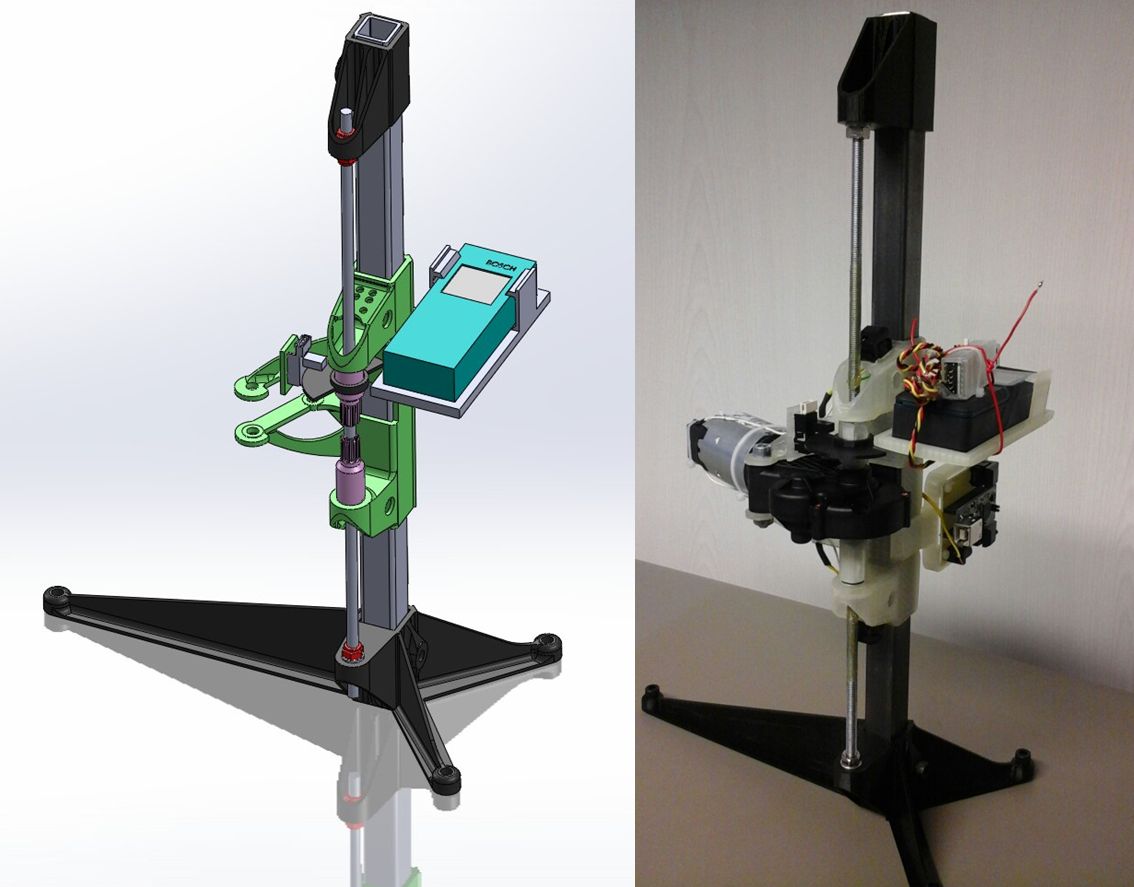 >> Wirklichkeit
>> Wirklichkeit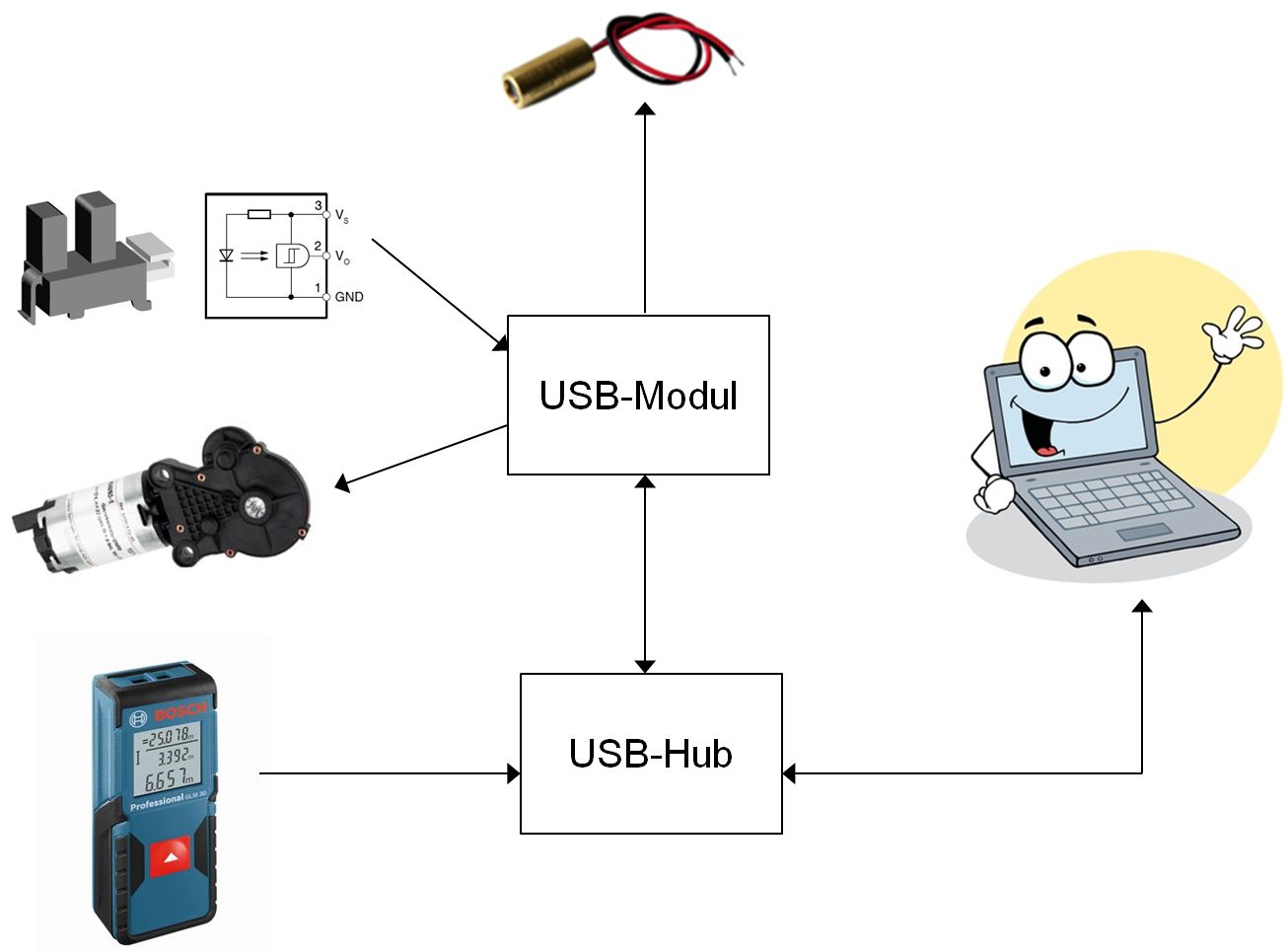 Elektrische Ansteuerung
Elektrische Ansteuerung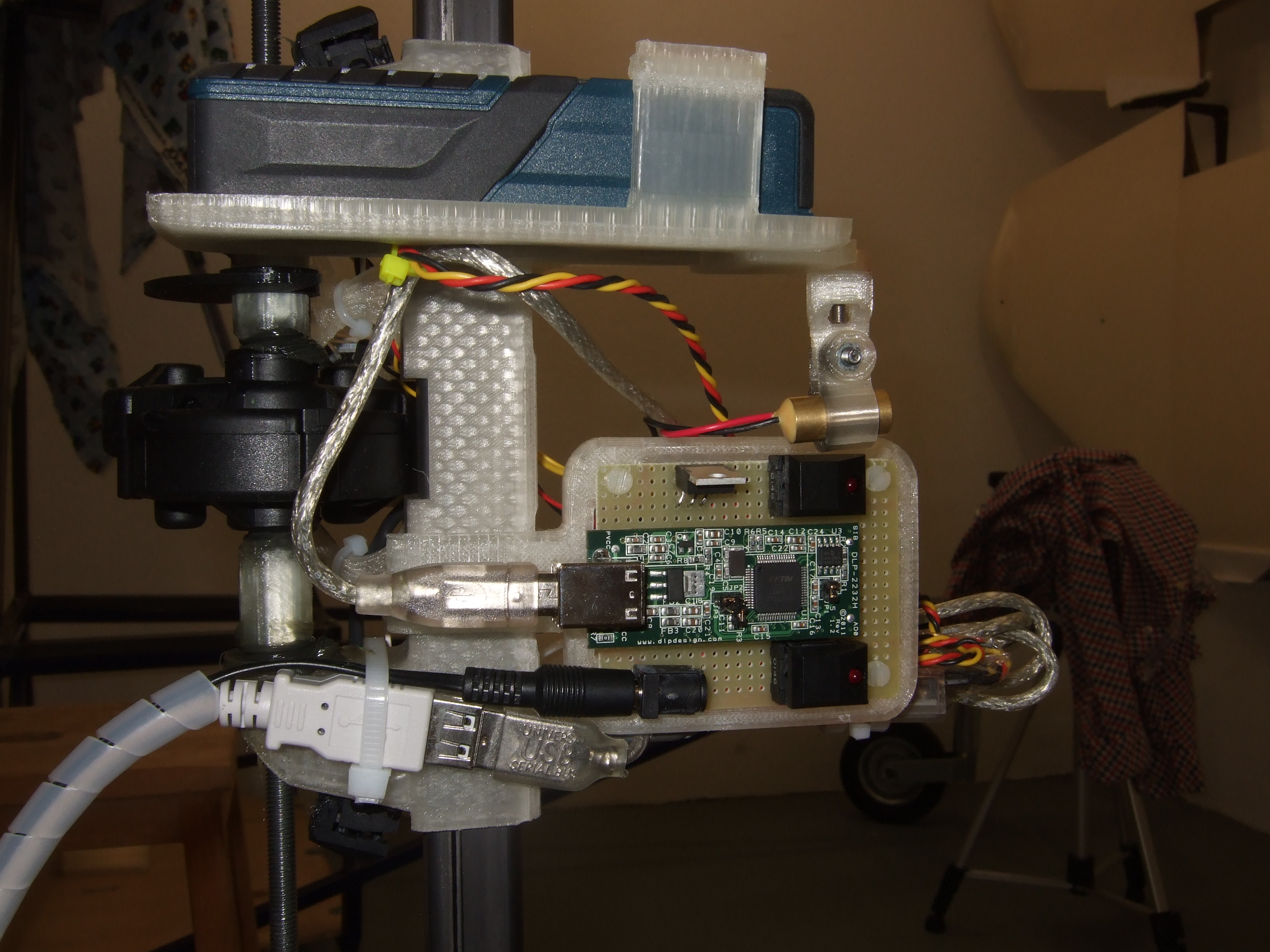
 USB Hub
USB Hub
 Video >
Video >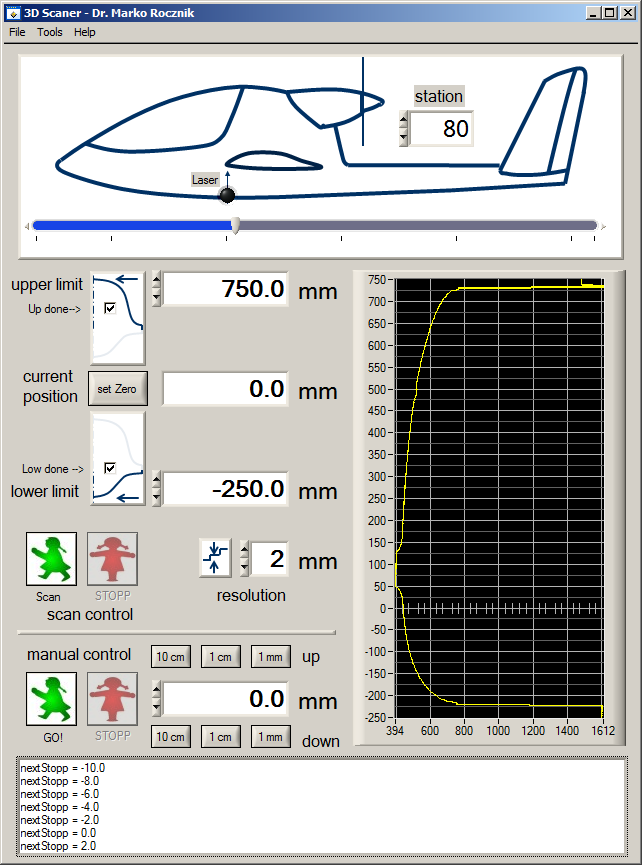
 Genauigkeit
Genauigkeit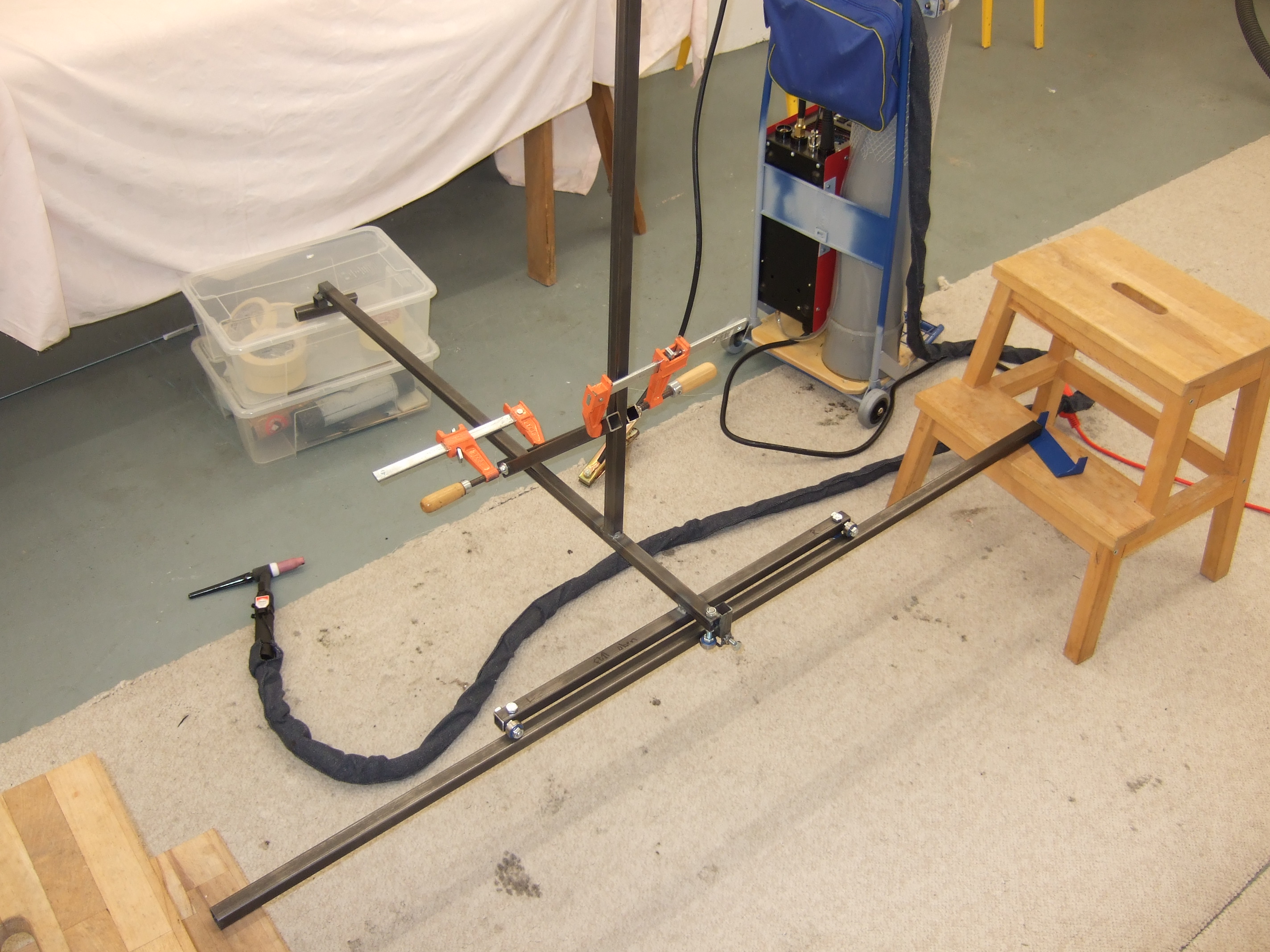 Z-Laufrohr ausrichten
Z-Laufrohr ausrichten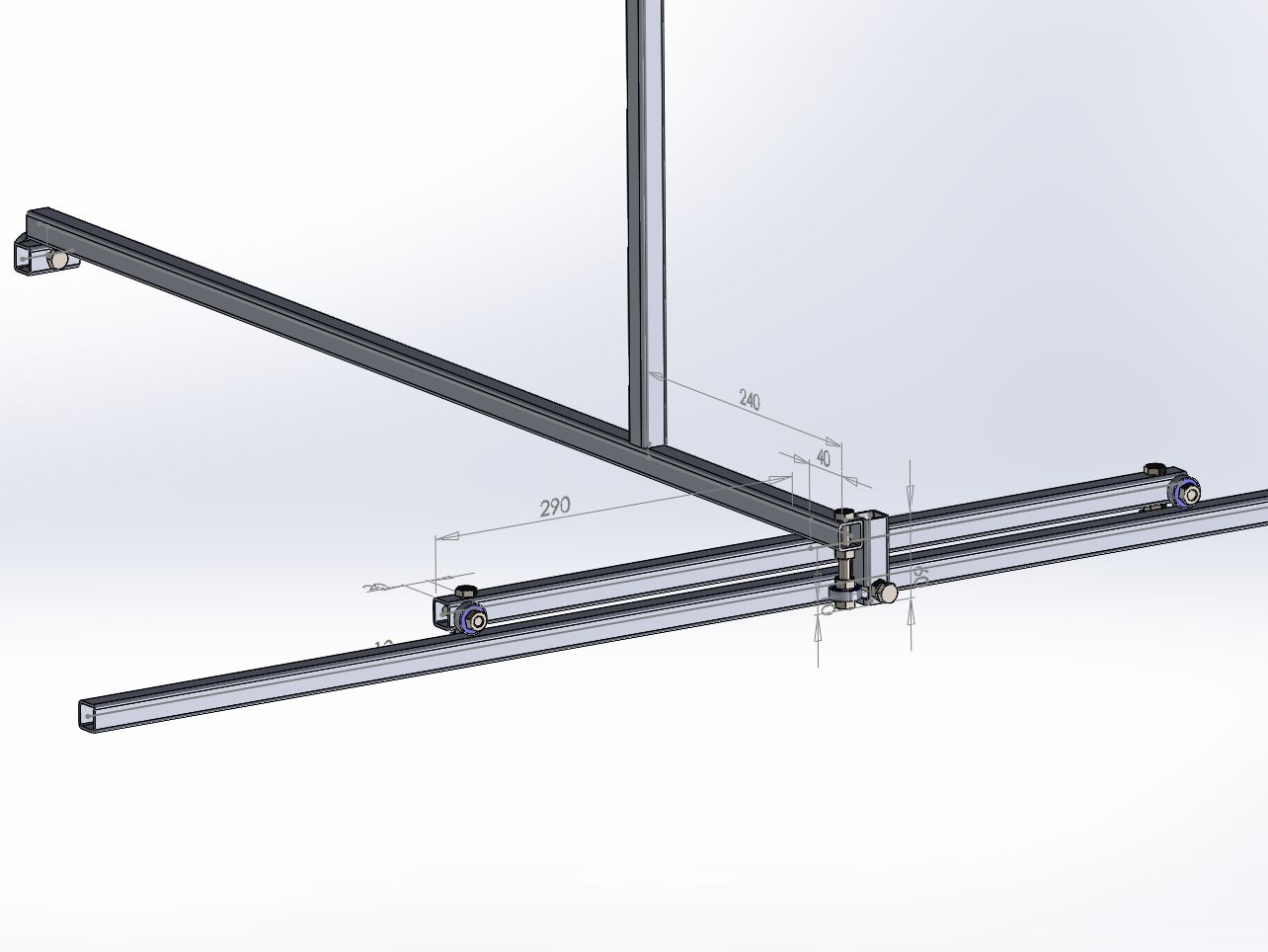
 Schweißen
Schweißen

 Ausrichten
Ausrichten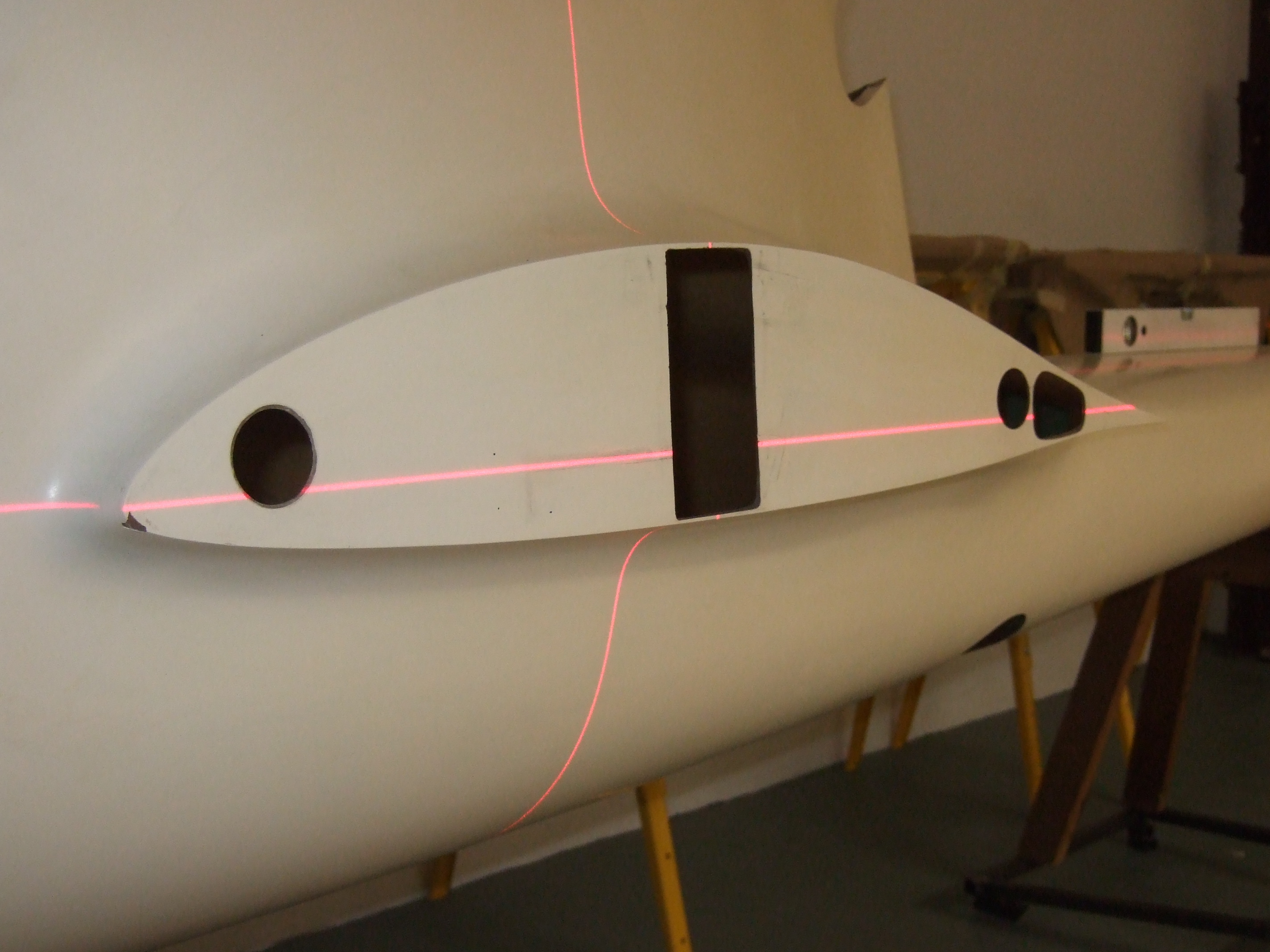
 Leitwerksträger
Leitwerksträger


 Dummyhaube laminieren
Dummyhaube laminieren
 Bosch Linienlaser
Bosch Linienlaser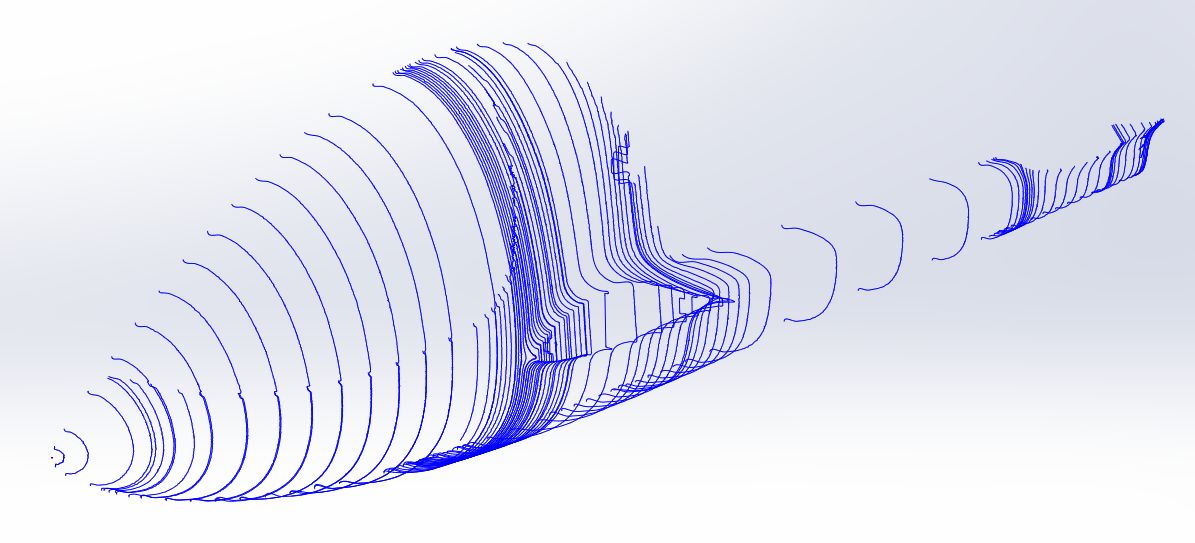
 Video >>
Video >> 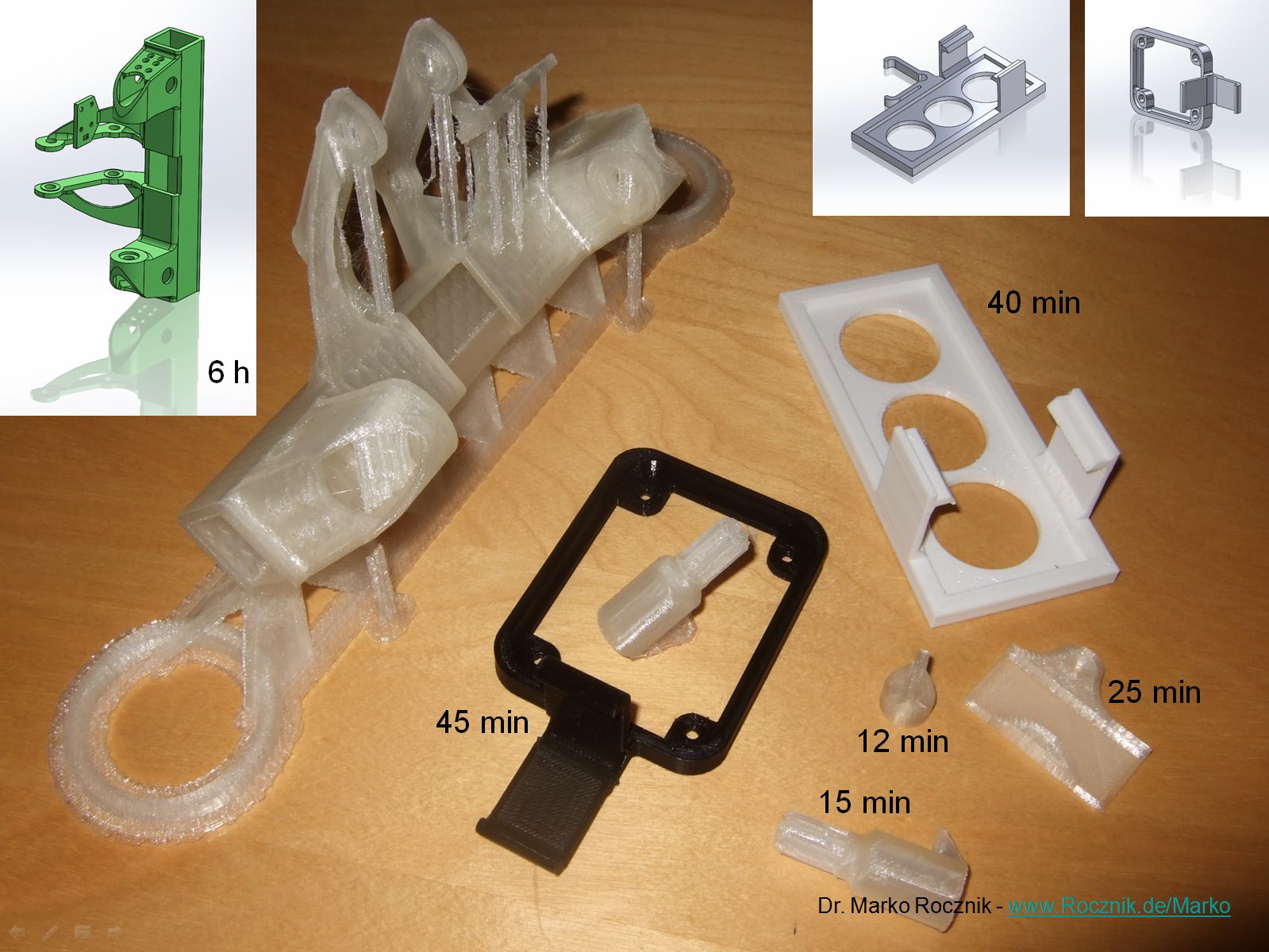 Druckzeiten
Druckzeiten J-5 Home
J-5 Home